1.动作捕捉技术
动作捕捉技术是指利用外部设备对人体结构的运动进行数据记录和姿态还原的技术。
动作捕捉系统通常由硬件和软件两部分构成。硬件包含刚体标记点、采集设备、传输设备及数据处理设备等;软件包含系统设置、空间标定、运动捕捉、数据处理以及3D模型映射模型等功能模块。
2.主流动作捕捉技术
2.1 光学动作捕捉技术
光学动作捕捉系统基于计算机视觉原理,由多个高速相机从不同角度对目标特征点的监视和跟踪,同时结合骨骼解算的算法来完成动作捕捉。理论上对于空间中的任意一个点,只要它能同时被两台以上相机所见,就可以确定这一时刻该点在空间中的3D位置。当相机以高帧率连续拍摄时,从图像序列中就可以得到该点的运动轨迹。
光学动捕采集设备通常是光学相机,分两种:一种是在物体上不额外添加标记,基于二维图像特征或三维形状特征提取的关节信息作为探测目标,这类系统统称为无标记点式光学动作捕捉系统;另一种是在物体上粘贴标记点作为目标探测点,这类系统称为标记点式光学动作捕捉。
2.1.1无标记点式光学动作捕捉
主流的无标记点式光学动作捕捉采用三维深度信息进行运动捕捉,系统基于结构光编码投射实时获取视场内物体的三维深度信息,根据三维形貌进行人形检测,提取关节概括性的运动轨迹描绘,普遍捕捉解算帧率和精度较低。
2.1.2标记点式光学动作捕捉
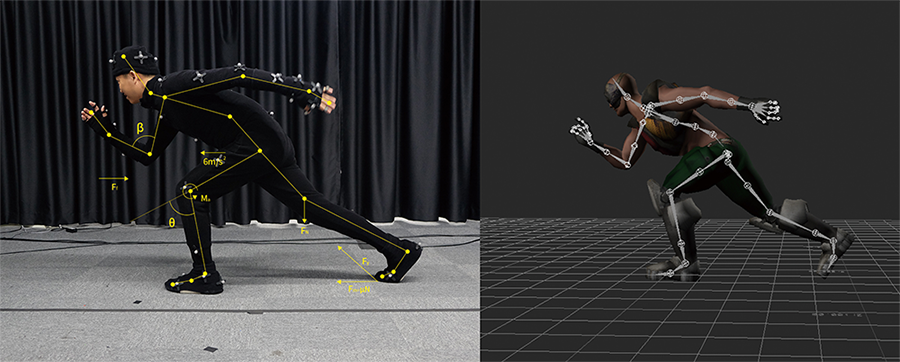
标记点式光学动作捕捉系统由光学标记点、动作捕捉相机、传输设备以及数据处理工作站组成,市场常说的光学动作捕捉系统通常是指这类标记点式动作捕捉系统。在运动物体关键部位(如人体的关节处等)粘贴Marker点,多个动作捕捉相机从不同角度实时探测Marker点,数据实时传输至数据处理工作站,根据三角测量原理精确计算Marker点的空间坐标,再从生物运动学原理出发解算出骨骼的6自由度运动数据信息。
根据标记点发光技术不同还分为主动式和被动式光学动作捕捉系统:
2.1.2.1主动式光学动作捕捉
主动式光学动作捕捉系统的Marker点由主动发光LED组成,LED粘贴于人体主要关节部位,安装比较简便。采用高亮LED发光,LED受脉冲信号控制明暗,以此对LED进行时域编码识别,识别效果较好,有较高的跟踪准确率;LED刚体需进行持续充电,并且由于识别原理原因,在一些需要超高帧率高速运动捕捉、大范围覆盖的需求上并不推荐使用,但系统刚体结构不容易损坏,易用性强。
2.1.2.2被动式光学动作捕捉
被动式光学动作捕捉系统,也称反射式光学动作捕捉系统,其Marker点通常是一种高亮反射式反光球,粘贴于人体各主要关节部位,由动作捕捉相机上发出的LED红外光经反光球反射至动捕相机,进行Marker的检测和空间定位。主要优点是技术成熟稳定,采样率高、动作捕捉准确,表演和使用灵活快捷,空间定位精度误差通常小于亚毫米级别,识别输入延迟低于2.9~5毫秒以下;能在不依靠更多外接设备的前提下,仅靠增加Marker点数量而让系统独立捕捉更多人的动作,Marker点可以很低成本地随意增加和布置,对被捕捉物的物体形态种类和空间范围上适用度较广。
2.2激光动作捕捉技术
从捕捉原理上,激光动作捕捉技术同属于主动光学式动作捕捉技术,激光动作捕捉技术基本原理是在空间内安装多个可发射激光装置,对空间发射横竖两个方向扫射的激光,被定位的物体上放置了多个激光感应接收器,通过计算两束光线到达定位物体的角度差获取物体的三维坐标和运动变化信息,完成空间内目标物的定位捕捉。由于系统独立对每个人体关节多个部位同时进行定位较为困难,通常与惯性动捕设备结合在一起进行全身动捕的使用。在需要捕捉每个骨骼关键、姿态动作分析的需求上较不推荐使用。
2.3 其他动作捕捉技术
此外,动作捕捉还有机械式、声学式、电磁式等动作捕捉技术,但是由于此类技术成本、可行性、精度等均无法达到主流动作捕捉技术水平,所以较少量产应用。
3.北京视动世纪大激光定位系统
STEP持有的激光定位技术及算法全部为自主研发,已申报各项专利近百项,其中已授权国际国内发明专利13项,实用新型专利15项,软件着作权6项。是全球目前唯一持有全套可用于大空间及异形空间内的激光定位及动作捕捉方案的企业,具备独家核心知识产权,形成了很高的行业技术壁垒同时产品的性价比极高,稳定性及易用性好。